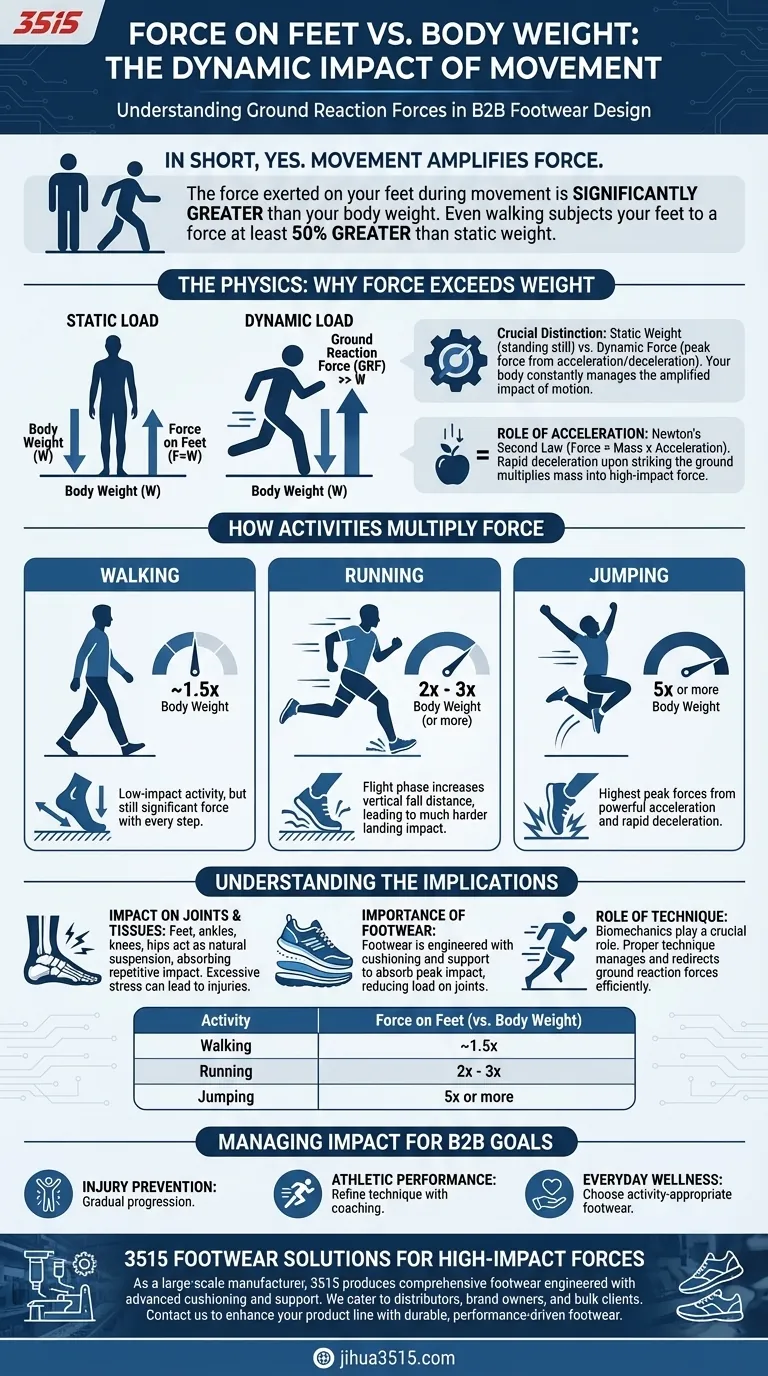
簡単に言うと、はい。 動くとき、足にかかる力は体重よりもはるかに大きくなります。歩くという単純な活動でさえ、一歩ごとの衝撃は、静止時の体重の少なくとも50%増しの力で足に作用します。
重要な区別は、静止時の体重(静止時にかかる力)と動的な力(動きの加速と減速によって生成されるピークフォース)の間にあります。体は単に体重を支えているだけでなく、動きによって増幅された衝撃を常に管理しています。
なぜ力は体重を超えるのか:物理学の問題
この現象を理解するには、単純な質量を超えて、運動の物理学を見る必要があります。足にかかる力は単なる体重ではなく、「地面反力」です。
静的負荷と動的負荷
完全に静止している場合、足にかかる力は体重と等しくなります。これは静的負荷です。骨格構造は、この予測可能で一定の力を支えるのに非常に効率的です。
しかし、動き出した瞬間、負荷は動的になります。体は一歩ごとに加速・減速するため、静止時の体重をはるかに超える力が急増します。
加速度の役割
ニュートンの運動の第二法則(力 = 質量 × 加速度)がこの核心にあります。足が地面に着地すると、空中の速度からゼロまで非常に急速に減速します。
この速度の急激な変化は、大きな加速度(負の方向)を生成し、質量を乗算して高衝撃力を生み出します。この衝撃を足と関節が吸収する必要があります。

さまざまな活動が方程式をどのように変えるか
この力の大きさは、活動の強度に直接関係しています。より活発な動きは、より大きな加速度、したがってより大きな衝撃を伴います。
歩行
歩行は低衝撃の活動ですが、それでもかなりの力を生み出します。広く引用されている数値は、一歩ごとに約体重の1.5倍であり、これは noted された50%の増加と一致します。
ランニング
ランニングには「空中相」があり、両足が地面から離れます。これにより、ストライドごとの体の落下距離が増加し、着地時の衝撃がはるかに大きくなります。
ランニング中に経験する力は、通常、体重の2倍から3倍の範囲であり、速度やフォームによってはさらに高くなることもあります。
ジャンプ
ジャンプは最も高いピークフォースを生成します。離陸に必要な強力な加速と着地時の急速な減速は、体重の5倍以上の力を生成する可能性があります。
影響の理解
この力の倍増は、私たちの体に重要な結果をもたらし、怪我のリスクから使用する機器まで、すべてに影響を与えます。
関節と組織への影響
足、足首、膝、股関節、腰は自然なサスペンションシステムとして機能します。これらは、一歩ごとにこれらの繰り返される衝撃力を吸収・分散します。
過度の、または不適切に管理された衝撃は、時間の経過とともに、ストレスによる怪我、関節痛、足底筋膜炎や疲労骨折などの状態につながる可能性があります。
履物の重要性
これが、アスレチックフットウェアがクッション性とサポートを備えて設計されている主な理由です。靴の中敷きは、ピーク衝撃力の一部を吸収し、関節を伝わる負荷を軽減するように設計されています。
テクニックの役割
動きのパターン、つまりバイオメカニクスも重要な役割を果たします。たとえば、オーバーステップしてかかとから強く着地するランナーは、ミッドフットに柔らかく着地するランナーよりも高いブレーキ力と衝撃力を生成します。
目標達成のための衝撃管理
これらの力を理解することで、活動や健康に関するより情報に基づいた決定を下すことができます。
- 怪我の予防が主な焦点の場合:新しい活動では、段階的な進歩を優先してください。これにより、骨、腱、筋肉は繰り返しのストレスに適応する時間ができます。
- 運動能力向上が主な焦点の場合:コーチと協力してテクニックを洗練してください。これらの地面反力を効率的に管理およびリダイレクトすることは、スピードとパワーの基本です。
- 日常の健康維持が主な焦点の場合:主な活動に適した履物を選んでください。ウォーキング用に設計された靴は、ランニングやコートスポーツ用に設計された靴とは異なるサポートを提供します。
あなたの体は信じられないほど回復力のあるシステムであり、動きの動的な力に耐え、適応できるように作られています。
概要表:
| 活動 | 足にかかる力(体重比) |
|---|---|
| 歩行 | 約1.5倍 |
| ランニング | 2倍~3倍 |
| ジャンプ | 5倍以上 |
これらの高衝撃力に対応するように設計された、耐久性の高い高性能フットウェアが必要ですか?
大規模メーカーとして、3515は、販売業者、ブランドオーナー、バルク顧客向けの包括的なフットウェア製品を製造しています。当社の生産能力は、あらゆる種類の靴やブーツを網羅しており、高度なクッション性とサポートを備えて設計されており、お客様の足と関節を動的な動きのストレスから保護します。
今日お問い合わせください 当社のフットウェアソリューションがお客様固有のニーズをどのように満たし、製品ラインを強化できるかについてご相談ください。
ビジュアルガイド